
Kontynuacja ataków ukraińskich dronów dalekiego zasięgu na Rosję
Od stycznia 2024 r. ukraińskie drony dalekiego zasięgu pojawiają się nad Rosją niemal codziennie. W początkowym okresie roku ich głównym celem stały się rosyjskie rafinerie ropy naftowej. Atakowane są też inne cele, a tym składy paliw, powodując poważne trudności w Rosji.
Owych bezpilotowych aparatów latających pojawia się coraz więcej. Głównym ich producentem jest firma UkrJet z Kijowa, która ma jednak zakłady (czy może raczej warsztaty) produkcyjne w utajnionych miejscach. Swoje drony oznacza ona skrótem UJ, stąd w użyciu są UJ-22 Airborne, UJ-25 Skyline i UJ-26 Beaver. Dwa z nich są napędzane silnikami tłokowymi o relatywnie niewielkiej mocy, za to oszczędnymi Pierwszy z nich, UJ-22, przy rozpiętości 4,2 m ma zasięg 800 km, ale przenosi tylko 20 kg głowicę bojową. UJ-25 z kolei ma napęd odrzutowy, bowiem jest odmianą celu latającego do ćwiczeń przeciwlotniczych UJ-23 Trapez. Na jego temat niewiele wiadomo. Zapewne jest używany do ataków na obiekty silniej bronione, bo jest droższy i trudniejszy w produkcji. Natomiast niezwykle populatny UJ-26 Beaver (Bober czyli bóbr), wykonany w układzie „kaczka” z przednim usterzeniem i skrzydłami z tyłu, ma on silnik z tyłu ze śmigłem pchającym. Zasięg tego aparatu sięga 1000 km, a masa głowicy bojowej to 20 do 30 kg, w większości materiału wybuchowego. Najczęściej aparaty te atakują takie cele, w których wywołują pożary bądź wybuchy, dlatego te głowice są w zupełności wystarczające. Jest to w zasadzie ekwiwalent pocisku artyleryjskiego kal. 155 mm. Nie ma tym możliwości zniszczenia mostu, ale skład paliw na przykład, to idealny cel.
Od niedawna używany jest nowy aparat dalekiego zasięgu o nazwie AQ 400 Scythe. Tradycyjnie, podobnie jak dla wielu innych aparatów, lokalizacja producenta jest utajniona, oficjalnie firma przyjęła nazwę Terminal Autonomy. Celowo używa się angielsko-języcznych nazw, by nie identyfikować aparatów ze znanymi ukraińskimi przedsiębiorstwami. AQ 400 ma zasięg 750 km przy głowicy bojowej 32 kg lub 900 km przy 20 kg głowicy. Można też zwiększyć masę głowicy bojowej do 50 kg, ale zasięg trzeba wówczas zmniejszyć, bo redukcji ulega zapas paliwa. Ogólnie aparat ma niewielkie rozmiary dzięki czemu łatwo przenika przez system obrony powietrznej.

Od samego początku roku rozpoczęła się kampania atakowania tymi dronami różnych rosyjskich rafinerii w promieniu do 800 km od granic Ukrainy, choć pojedyncze ataki były realizowane i na większą odległość, maksymalnie nieco ponad 1200 km. Za każdym razem celowano w kolumnę rektyfikacyjną, najważniejsze urządzenie w rafinerii, które jest kosztowne i trudne do zastąpienia. Zniszczenie takiej kolumny, a pożar był niemal pewny, owocowało zatrzymaniem produkcji na danej linii produkcyjnej na kilka lub nawet kilkanaście tygodni. Produkcja paliw w Rosji spadała, benzyna stała się towarem deficytowym, od początku wojny jej cena w Rosji wzrosła o 44 %.
W tym momencie do akcji wkroczyli Amerykanie, którzy zaczęli nalegać na zaprzestanie tych ataków. Argumentowali oni tym, że może to spowodować wzrost cen ropy naftowej na światowych rynkach i kryzys gospodarczy na świecie. Argument był „irracjonalny”, jako że rafinerie pracowały na rynek wewnętrzny, zaś eksport ropy z Rosji nie miał z tym nic wspólnego. Rzeczywistym powodem amerykańskiej interwencji wydaje się jednak strach USA przed „dociskaniem” Rosji do ściany, z obawy użycia przez Moskwę broni jądrowej. Strach przed bronią jądrową bardzo mocno paraliżuje działania USA, choć jest to raczej strach dość irracjonalny. Rosja nie potrzebuje broni jądrowej do realizacji swoich celów, a już na pewno nie zrealizowaliby ich po jej użyciu.

Ukraina zaprzestała ataków na rafinerie dopiero po uchwaleniu przez USA pakietu pomocy wojskowej i finansowej, ale zamiast tego podjęto ataki na składy paliw, które zdecydowanie były przeznaczone na użytek wewnętrzny. Wywołało to ponownie trudności z zaopatrzeniem transportu i wojska w paliwa, ale tym razem USA już nie protestowała. Jednocześnie jednak atakowano też bazy lotnicze na terenie Rosji, w Millerowie na przykład zniszczono skład paliw oraz hangar eskadry technicznej. Ataki ukraińskich aparatów dalekiego zasięgu stały się już wręcz normą i są prowadzone praktycznie codziennie, celem są też podstacje elektryczne (transformatory olejowe również się doskonale palą), co wywołuje trudności z zaopatrzeniem w prąd w niektórych obwodach Rosji.
Michał Fiszer, współpraca Maciej Herman
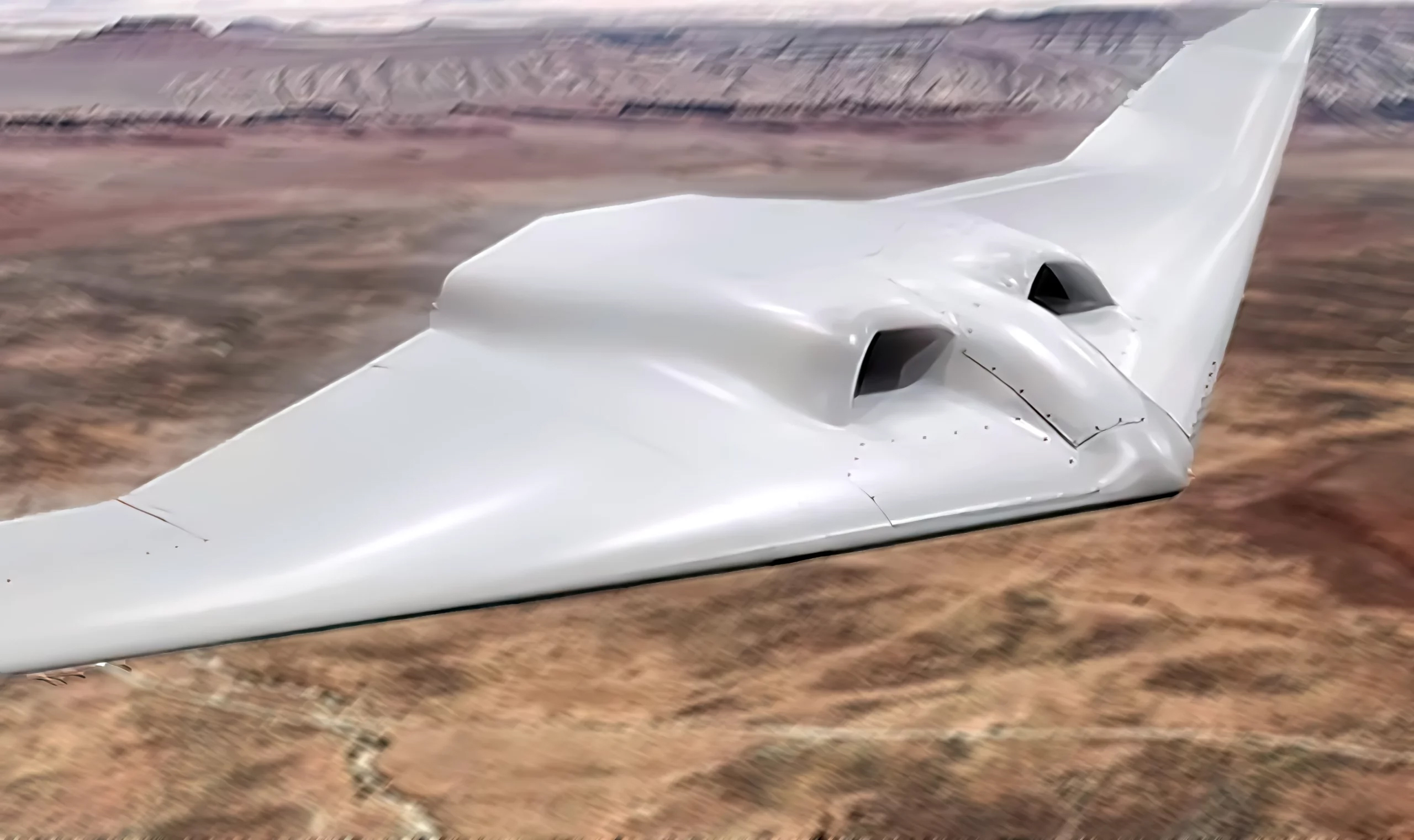
Właśnie zaprezentowano perspektywiczny bezpilotowy aparat latający XRQ-73, który ma zostać oblatany jeszcze w końcu tego roku. Największą zagadką tego systemu jest perspektywiczny napęd, określany jako hybrydowo-elektryczny.
Prace są prowadzone we współpracy z DARPA czyli Obronną Agencją ds. Zawansowanych Projektów Badawczych (Defence Advanced Research Projects Agency) w ramach programu Serii Demonstracji Aparatów z Napędem Hybrydowo-Elektrycznym (Series Hybrid Electric Propulsion AiRcraft Demonstration – SHEPARD).
Aparat wykonano w klasie MALE, czyli do latania maksymalnie na średnich wysokościach, ale o dużej długotrwałości lotu. Nowy XRQ-73 mieści się w dolnym segmencie aparatów MALE, niemal na pograniczu z klasą TUAV (taktyczne bezpilotowe aparaty latające przeznaczone dla wojsk do działania na szczeblu taktycznym (brygada, dywizja). Aparaty MALE z reguły służą w siłach powietrznych, a zatem zakłada się ich wykorzystanie z lotnisk, dlatego właśnie XRQ-73 są wyposażone w trójkołowe podwozie chowane w locie, które wskazuje na ich użycie z lotnisk w sposób klasyczny – start i lądowanie, nawet jeśli są prowadzone w trybie automatycznym, to jednak w konwencjonalny samolotowy sposób. Aparat powstał w układzie latającego skrzydłą bez usterzenia pionowego co ułatwia wykonanie go w technice stealth, czyli o utrudnionej wykrywalności, tak by mógł swobodnie penetrować nieprzyjacielską przestrzeń powietrzną. Masa startowa aparatu ma wynosić ok. 570 kg, pułap ma sięgać do 5500 m, zaś prędkość maksymalna – od 150 do 400 km/h. Głównym jego przeznaczeniem ma być prowadzenie rozpoznania i przesyłania danych z rozpoznania w czasie rzeczywistym, specjalnie dla wyposażenia rozpoznawczego pod kadłubem umieszczono gondolę o kształtach spełniających wymogi stealth.

Chociaż Northrop-Grumman, firma mająca obecnie doświadczenie w integracji systemów, w opracowaniu systemów elektronicznych oraz w budowie bezpilotowych aparatów latających (w przeszłości zgromadzono też wiedzę i doświadczenie w zakresie budowy samolotów pilotowanych), to jednak w programie uczestniczy wiele innych podwykonawców, w tym Scaled Composites (spółka córka Northrop-Grummana – odpowiada za materiały kompozytowe i inne do konstrukcji lotniczych), Cornerstone Research Group (badania nad gromadzeniem i konwersją energii), Brayton Energy (opracowanie i badania w zakresie sprężarek, turbin i wentylatorów), PC Krause and Associates (oprogramowania, modelowanie i symulacje) i EaglePicher Technologies (producent akumulatorów i instalacji elektrycznych).
Oczywiście najciekawszy w samym aparacie jest jego napęd, nigdy dotąd w lotnictwie nie stosowany. Ma to być napęd elektryczny, ale wytwarzany z energii chemicznej spalania paliwa, która to energia jest też gromadzona, by wykonywać lot na silnikach elektrycznych w momencie, kiedy paliwo nie jest spalane (przetwarzane chemicznie) w celu wytworzenia energii elektrycznej. Jest to technologia stosowana w napędach nowoczesnych okrętów podwodnych korzystających z ogniw paliwowych i silników chemicznych w ramach programów AIP (Air Independent Propulsion – napęd niezależny od dostępu powietrza). Chodzi o to, że tą metodą można wytworzyć bardzo duży zapas energii elektrycznej, pozwalający na zasilanie silników elektrycznych przez bardzo długi czas. Silniki elektryczne pracują niezwykle cicho, a przy odpowiednim chłodzeniu nie wytwarzają wielkiego śladu termicznego w podczerwieni. Rzecz w tym, że silniki elektryczne muszą napędzać jakąś formę śmigła lub wentylatora by wytworzyć ciąg niezbędny do lotu. Tymczasem na pokazanym modelu XRQ-73 aparat ma chwyty powietrza i wyloty jak w przypadku silników odrzutowych, żadne śmigła nie są widoczne na zewnątrz. Logicznym wydaje się wyjaśnienie, iż we wnętrzu tuneli znajdują się wentylatory wymuszające przepływ powietrza i wytwarzające ciąg. Wybrano takie mniej ekonomiczne rozwiązanie, bowiem wentylatory można osłonić przed dostępem fal radarowych przeciwnika, by odbiciami dopplerowskimi nie „psuły” one charakterystyk utrudnionej wykrywalności.
Będziemy obserwować dalsze losy XRQ-73 i nie omieszkamy podać więcej szczegółów, jak będą one już znane.
Michał Fiszer, współpraca Maciej Herman
To, w jaki sposób małe tanie bezpilotowce zmieniły obraz pola walki, nie śniło się nikomu w najśmielszych prognozach na przyszłość. Wśród nich są cztery kategorie aparatów: komercyjne dostosowane do rozpoznania i obserwacji pola walki, komercyjne typu FPV przebudowane na improwizowaną amunicję krążącą, profesjonalne (military grade) bezpilotowe aparaty latające klasy „taktyczne” i „małe taktyczne” oraz profesjonalna (military grade) amunicja krążąca. Ich zwalczanie jest poważnym problemem.
Prawdziwym problemem z punktu widzenia obrony przed dronami jest ich masowe użycie, które z kolei wynika z faktu, że są one wyjątkowo tanie. Łatwo można je więc zakupić w niewyobrażalnie dużych ilościach. Bardzo wiele z nich jest traconych z powodu zakłóceń radioelektronicznych i zerwania łączności pomiędzy aparatem a operatorem. Większość komercyjnych dronów ma zakres automatycznego powrotu na miejsce startu, ale powszechną praktyką jest wyłączanie tego zakresu, tak by nie udało się oddziałom walki radioelektronicznej przeciwnika ustalić miejsca znajdowania się operatora. Operatorzy dronów w obu walczących armiach są na wagę złota, ci doskonale wyszkoleni i doświadczeni potrafią osiągnąć bardzo wiele, w tym prowadzić efektywną obserwację pola walki, atakować cele naziemne w taki sposób, by niszczyć nawet czołgi dronami FPV, a także potrafią zrzucać ładunki bojowe w postaci granatów ręcznych, moździerzowych czy pocisków do ręcznych granatników przeciwpancernych. Niektórzy doszli do tak niesamowitej wprawy, że potrafią wlecieć dronami FPV do wnętrza budynków, do środka pojazdów pancernych przez otwarte włazy lub pod specjalne osłony przeciwko dronom.
Ostatnio w Ukrainie pojawiły się dwa sposoby na walkę z dronami. Po pierwsze, przechwytywanie wrogich aparatów przez własne typu FPV, które są w takich „samobójczych” atakach najczęściej tracone. Są jednak na tyle sprawni operatorzy, że potrafią wytrącić wrogi aparat z równowagi wychylając te w układzie quadrocoptera poza przechylenia dopuszczalne, bez utraty kontroli nad własnym aparatem. Te wytrącone z położenia, przy którym są w stanie wyrównać lot, spadają i ulegają zniszczeniu lub są przejmowane przez wojska ukraińskie.

Właśnie się dowiedzieliśmy, że Rosjanie wprowadzają do uzbrojenia nowy myśliwski aparat Wogan 9SP. Po wykryciu wrogiego aparatu przez specjalny radar naziemny pracujący na wysokich częstotliwościach, a zatem mający możliwość wykrywania małych obiektów, cel jest podświetlany przez stację laserową współpracującą z radarem, a Wogan 9SP wystrzeliwany pod kątem 45 stopni ściga cel z prędkością 200 km/h uderzając w niego swoją twardą nosową częścią. Aparat jest napędzany silnikiem elektrycznym, ale cztery śmigła są umieszczone na końcach skrzydełek z tyłu kadłuba. W ten sposób śmigła nie ulegają uszkodzeniom przy zderzeniach ze zwalczanym dronem. Wogan 9SP może latać jak samolot ze skrzydłami, kiedy śmigła służą do jego napędu, ale może też latać jak quadrocopter po odwróceniu do pozycji pionowej (choć ma trzy śmigła). Przypuszczalnie tak wraca na miejsce startu, po wytraceniu prędkości w wyniku zderzenia z celem, choć sam producent traktuje go jako jednorazowy, nie wierząc w możliwość powrotu po zderzeniu z celem. Na ile nowy aparat sprawdzi się w realnych działaniach to się dopiero przekonamy.
Na razie my do czynienia jedynie z doraźnymi atakami na drony w wykonaniu głównie ukraińskich operatorów. Zapewne Rosjanie też podejmują takie próby, ale się tym nie chwalą. Obiektami ataków są głównie wrogie aparaty bojowe, tzw. amunicja krążąca, głównie typów Zala i Lancet, co oczywiście chroni własne wojska przed startami ze strony tych tzw. dronów-kamikaze.
W Ukrainie wykorzystuje się też kilka sportowych samolotów do przechwytywania i niszczenia większych aparatów taktycznych, ale o tym przy innej okazji. Na razie natomiast czekamy na bojowy debiut Wogana 9SP i zobaczymy, czy przyjęte założenia znajdą potwierdzenie w praktyce.
Michał Fiszer, współpraca Maciej Herman
Niedawno bezpilotowy aparat latający UHV 170 zbudowany w układzie jednowirnikowego śmigłowca zademonstrował możliwość autonomicznego wykonania lotu dostarczenia materiałów medycznych na odległość 35 km. Masa materiałów – 10 kg.
Warto zwrócić uwagę na producenta śmigłowców, firmę UAVOS. To niedawno utworzony start-up, zatrudniający zaledwie ok. 90 osób, ale mający dwa oddziały w Stanach Zjednoczonych, jeden w Hongkongu i jeden w Szwajcarii. Jest to firma, która próbuje się wyspecjalizować w cywilnym rynku bezpilotowych aparatów latających, choć produkuje też układy automatycznego sterowania do bezpilotowych aparatów latających innych firm. Obecnie firma ma w ofercie trzy śmigłowce bezpilotowe, dwa lekkie – UHV 170 o masie startowej do 45 kg i UHV-25EL o masie startowej 25 kg oraz ciężki UHV 500 powstały na bazie lekkiego sportowego śmigłowca Heli-Sport CH7 produkcji włoskiej (jest on sprzedawany w postaci elementów do samodzielnego składania). Firma ta wytwarza też aparaty w układzie samolotowym. Wszystkie charakteryzują się niską ceną, co jest zapewne motorem rozwojowym UAVOS.
Obecnie duży sukces odniósł dron UHV 170 pomyślnie przechodząc próby na terenie Stanów Zjednoczonych w transporcie materiałów medycznych. Drony to nowe rozwiązanie na tym polu, bowiem mogą startować i lądować z miejsc, gdzie nie ma lądowisk dla śmigłowców (UHV 170 dla bezpieczeństwa wymaga płaszczyzny 15 na 15 m). Z reguły jednak lądowiska dla śmigłowców są większe, zwłaszcza, że jeśli mówimy o lotach nad miastem, a szpitale i laboratoria medyczne są przecież w miastach, to amerykańskie przepisy FAR-29 wymagają latania śmigłowcem dwusilnikowym, czyli większym niż małe konstrukcje typu Robinson 44. Jednocześnie wykorzystanie dronów jest zdecydowanie tańsze niż użycie śmigłowca i można takich lotów wykonać nawet kilka czy kilkanaście dziennie. Jeśli są to próbki medyczne wymagające pilnego dostarczenia do laboratorium, to dron robi to w ciągu kilkudziesięciu minut. Prędkość przelotowa UHV 170 z podwieszonym ładunkiem to 60 km/h, a w miejskich korkach przejazd karetki może trwać godzinę na drugi koniec miasta na odległość 15 km, dron tę odległość pokona w 15 minut.
UHV 170 dysponuje prędkością maksymalną bez ładunku 120 km/h, ma zasięg bez ładunku 350 km, z ładunkiem nieco mniej. Maksymalny ładunek to 15 kg. Długość śmigłowca wynosi 3285 mm, a rozpiętość wirnika 2600 mm. Maksymalna możliwa wysokość lotu to 5000 m. Najciekawsze jest to, że śmigłowiec ma bardzo dobry system nawigacyjny. Jest on oparty nie tylko na odbiorniku GPS, ale także na możliwości wizualnej korelacji terenu pod śmigłowcem z obrazem ziemi, który pochodzi z oprogramowania podobnego do Google Maps. Zapewnia to uniknięcie błędu wynikającego z niepoprawnej pracy systemu nawigacji satelitarnej czy zakłócenia sygnału. Lot może być wykonany w pełni autonomicznie, ale operator w czasie lotu może zaingerować, zmieniając parametry lotu z laptopa służącego do zarządzania misją. Jednocześnie aparat posiada nie tylko funkcję automatycznego startu i lądowania, ale także ma możliwość wykonania automatycznej autorotacji w przypadku zgaśnięcia silnika (napędzany jest benzynowym silnikiem spalinowym o mocy 10 KM). W takiej sytuacji operator może zmienić decyzję o autorotacji (lub system elektrooptyczny systemu stwierdzi, ze pod aparatem nie ma płaszczyzny do lądowania) na decyzję o wypuszczeniu spadochronu ratowniczego.
Aparat nie musi lądować w miejscu odebrania lub zdania materiałów medycznych jeśli nie ma miejsca. Może zawisnąć na wysokości 20 m i za pomocą niewielkiej wyciągarki opuścić podwieszony ładunek (kontener do załadunku) na ziemię. Pozwala to na operowanie w miejscach, gdzie ma nawet 15 metrowej płaszczyzny do lądowania.
Oczywiście transport medyczny nie musi być koniecznie związany z próbkami do laboratorium, równie dobrze może transportować medykamenty. Mówi się też o transporcie organów dla przeszczepu, dlatego w opracowaniu jest specjalny kontener w którym można utrzymać niezbędne warunki (głównie temperaturę).
Warto w tym miejscu wspomnieć, że w Polsce już używano dronów do transportu medycznego próbek w okresie epidemii COVID 19. 24 lutego 2022 r. firma LabAir będąca częścią Farada Group uzyskała zgodę na regularne transporty dronowe próbek medycznych dla ALAB laboratoria. Dron Farada G1 pierwszy historyczny start do 60-kilometrowego lotu wykonał chwilę przed 12:00 pod nadzorem inspektorów z Urzędu Lotnictwa Cywilnego. Około 12:30 dron wylądował w Sochaczewie na przyszpitalnym lądowisku. Był to nieco inny aparat, bo miał układ hybrydowy – samolotowy ze skrzydłami, ale z czterema wirnikami umożliwiający pionowy start i lądowanie.

Michał Fiszer, współpraca Maciej Herman

W branży lotniczej rozwój technologii i kompetencji zawodowych odgrywa kluczową rolę. W odpowiedzi na rosnące zapotrzebowanie na specjalistów w dziedzinie eksploatacji portów i terminali lotniczych, powstało Branżowe Centrum Umiejętności SkyPort. Ta nowatorska placówka, jedyna na Śląsku, oferuje kompleksowe szkolenia, kształcenie i egzaminowanie, skierowane do szerokiego grona odbiorców.
Czym jest BCU SkyPort?
BCU SkyPort to nowoczesne centrum szkoleniowe, które powstało z inicjatywy trzech kluczowych partnerów:
– Zakładu Doskonalenia Zawodowego w Katowicach – lidera projektu
– Śląskiego Klastra Lotniczego – partnera branżowego
– Politechniki Śląskiej, Wydziału Transportu i Inżynierii Lotniczej – partnera naukowego
Wspólnym celem jest umożliwienie uczniom, studentom, nauczycielom oraz osobom dorosłym pragnącym się przekwalifikować zdobycie nowej wiedzy i umiejętności, a także zawodowych kwalifikacji w zakresie eksploatacji portów i terminali lotniczych.
Wśród proponowanych kursów znajdą się m.in.:
– Szkolenie z przewozu materiałów niebezpiecznych DGR
– Szkolenie z pierwszej pomocy
– Szkolenie operatora dronów NSTS
– Modelowanie, symulacja i optymalizacja systemów w branży lotniczej
– Programowanie robotów – poziom podstawowy
– Wprowadzenie do teledetekcji
– Zarządzanie kryzysowe na lotnisku w oparciu o wirtualną rzeczywistość
– Cyberbezpieczeństwo w lotnictwie
– Obsługa lotniskowa pasażera ze specjalnymi potrzebami
– Sytuacje awaryjne na lotnisku
– Koordynacja pracy służb operacyjnych lotnisk
– Szkolenie z technik lotniskowych służb operacyjnych
– Kierowca operatora wózka widłowego w strefie CARGO i na lotnisku
Szczegółowe informacje na temat terminów szkoleń oraz możliwość zapisów są dostępne na stronie internetowej BCU Sky Port https://bcuskyport.katowice.pl oraz w mediach społecznościowych:
Facebook https://www.facebook.com/BCUSkyPort/
Instagram https://www.instagram.com/bcuskyport/
LinkedIn https://www.linkedin.com/company/bcuskyport/?viewAsMember=true
Zapisów można również dokonać stacjonarnie w siedzibie BCU SkyPort w Katowicach, przy ulicy Krasińskiego 2.

Ostatnio bezpilotowe aparaty latające działające w Ukrainie znalazły nowe zastosowanie. Nikt nie spodziewał się, że te zdalnie sterowane latające roboty mogą robić jeszcze to.
To, że Ukraina stała się wojną bezpilotowców, to wiemy nie od dziś. Początkowo triumfy święciły tureckie Bayraktary TB2, które nie tylko zdołały rozpoznać ruchy rosyjskich wojsk, ale też skutecznie je atakowały unieruchomione rosyjskie kolumny pancerne pod Kijowem. Unieruchomione, bo szwankowała rosyjska logistyka i nie nadążała z dowozem paliwa dla wojsk.
Później jednak Rosjanie zreorganizowali swoją obronę przeciwlotniczą wojsk i stała się ona o wiele bardziej skuteczna. Teraz Bayraktary obserwowały pole walki z daleka, tak by nie wchodzić w zasięg wrogiej obrony przeciwlotniczej. W międzyczasie jednak Ukraińcy odkryli tanie chińskie drony. Tanie, bo na chińskich portalach można je kupić za dwa tysiące dolarów, co jak na sprzęt mający zastosowanie wojskowe to naprawdę niewiele.
Początkowo te bojowe drony zrzucały lekkie pociski, granaty moździerzowe małego kalibru lub pociski do popularnego granatnika przeciwpancernego RPG. Jednak już jesienią 2022 r. odkryto, że najlepiej do tego celu nadają się tzw. drony FPV, używane przez amatorów wyścigów dronów. Są to aparaty, które dzięki specjalnym okularom zapewniają widok jakby bezpośrednio z drona. Dzięki temu da się nimi sterować niezwykle precyzyjnie. Drony FPV były przebudowywane na bojowe przez uzbrajanie je w głowice bojowe i stosuje się je jako jednorazową amunicję krążącą do atakowania czołgów, transporterów opancerzonych i dział. Począwszy od wiosny 2024 r. odpowiadają one za największą liczbę rosyjskich strat sprzętowych, są stosowane dosłownie setkami tysięcy i nie ma w tym przesady. Rosja może sobie pozwolić na straty osobowe, bo ma spory zasób mobilizacyjny, ale nie może sobie pozwolić na tak wielkie straty w ciężkim sprzęcie bojowym. Jego produkcja bowiem pokrywa co najwyżej miesięczne straty. Obecnie Rosja sięga do przepastnych magazynów mobilizacyjnych, ale to źródło może się skończyć za 1,5 roku do 2,5 lat, według różnych wyliczeń. Wówczas Rosja będzie musiała zamrozić konflikt do czasu wyprodukowania odpowiedniej ilości sprzętu.
Właśnie drony bojowe przyniosły taką rewolucję. Ale Ukraińcy wykorzystują bezpilotowe aparaty latające nie tylko do rozpoznania i zadań bojowych, ale także do innych zadań. Część aparatów wspomaga służby medyczne, dostarczając rannym na polu walki pakiety opatrunkowe i inne środki medyczne, nim dotrze do nich grupa ewakuacji medycznej. Podobne drony są też wykorzystywane do zaopatrywania w amunicję wysunięte posterunki na pierwszej linii, choć oczywiście udźwig zaopatrzenia nie jest duży.
Co ciekawe, w mniejszym stopniu wykorzystuje się bezpilotowe aparaty latające do prowadzenia rozpoznania radioelektronicznego i do stawiania zakłóceń aktywnych. Jeśli chodzi o to pierwsze zadanie, to oczywiście jest ono dość szeroko wykonywane przez państwa nie biorące udziału w konflikcie. Systematyczne rozpoznanie radioelektroniczne z użuciem aparatów MQ-9 Reaper i RQ-4 Global Hawk prowadzą Amerykanie znad Morza Czarnego, zapewne część opracowanych danych jest przekazywana Ukrainie. Rosjanie do podobnych celów używają bezpilotowych aparatów latających typu Forpost.
Ostatnio pojawiło się jeszcze jedno zastosowanie, dzięki wielkim aparatom komercyjnym, które są w Ukrainie nazywane Baba Jaga. Są to duże, przeważnie seksto- lub oktokoptery z sześcioma-ośmioma wirnikami nośnymi, o udźwigu rzędu 50 kg. Są one sprzedawane jako aparaty dla rolnictwa, do oprysków czy nawożenia, kosztują nawet do 20 000 dolarów. W Ukrainie dostosowano je do roli bojowych. Albo zrzucają one po 4-6 pocisków moździerzowych przebudowanych na bomby lotnicze, albo przenoszą na większą odległość małe drony FPV, które same stają się indywidualną amunicją krążącą, sterowaną dzięki retransmisji z Baby Jagi.
Właśnie pojawiło się jednak doniesienie, że Ukraińcy użyli dronów Baba Jaga do jeszcze jednego zastosowania. Aparaty tego typu latają nocą nad rosyjskie tyły i upuszczają na ziemię miny przeciwpancerne lub rozrzucają miny przeciwpiechotne. Powoduje to, że na z pozoru bezpiecznych drogach i wokół rosyjskich obozów wojskowych niespodziewanie pojawiają się miny. Znacznie ogranicza to poruszanie się rosyjskich wojsk i zaopatrzenia, trzeba bowiem uważać na pojawiające się nie wiadomo skąd miny. Użycie dronów do minowania to absolutna nowość, ale jak widać, pomysłowość ludzka nie zna granic.



Michał Fiszer
Jest to pierwszy w Polsce tego rodzaju system bezpilotowy zapewniający kompleksowe poszukiwanie i zwalczanie celów przy pomocy dwóch różnych typów aparatów, rozpoznawczych i uderzeniowych. Właśnie wszedł do uzbrojenia Wojska Polskiego.
Cały system powstał w dość doświadczonej już na polu bezpilotowców firmie WB Electronics Group z Ożarowa pod Warszawą. Tu właśnie powstała koncepcja ciekawego systemu który łączy funkcję rozpoznawcze i poszukiwania celów z funkcjami uderzeniowymi, w związku z czym używa dwóch różnych typów aparatów.

Pierwszy typ to rozpoznawcze FT-5, które prowadzą obserwację i poszukiwanie celów, dostarczając o nich informacje w czasie rzeczywistym. Aparat, nazywany początkowo Łoś, został po raz pierwszy zaprezentowany na targach MSPO w Kielcach we wrześniu 2016 r. Wówczas aparat ten startował bez powodzenia w programie „Orlik”, pozyskania aparatu rozpoznawczego małego zasięgu dla brygad wojsk lądowych. Sam aparat powstał w firmie Flytronic S.A. z Gliwic, która należy do Grupy WB Electronics. Konstruktorem aparatu był Wojciech Szumiński.

Aparat oblatany po raz pierwszy w 2017 r. ma masę własną 55 kg i maksymalną masę startową 85 kg. Jest to stosunkowo mało jak na rozpiętość skrzydeł 6,4 m i długość kadłuba 3,1 m. Uzyskano to wykorzystując do jego budowy lekkie, wytrzymałe materiały, przede wszystkim laminaty i kompozyty epoksydowe. Aparat zbudowano w klasycznym układzie z pojedynczym kadłubem, prostym skrzydłem i klasycznym usterzeniem w tylnej części kadłuba, ze statecznikiem poziomym w układzie litery „T”. Aparat nie posiada podwozia, ale dzięki niewielkiej prędkości lądowania w locie szybującym i systemowi stabilizującemu położenie samolotu, nie ma ryzyka uszkodzenia konstrukcji podczas lądowania, które wykonuje się z wykorzystaniem zjawiska kontrolowanego przeciągnięcia.

Napęd aparatu stanowią dwa silniki spalinowe umieszczone w skrzydłowych gondolach, ale możliwe jest też zastosowanie silników elektrycznych. Dla systemu Gladius, na wniosek odbiorcy wojskowego, w aparatach FT-5 zastosowano napęd hybrydowy w postaci silnika spalinowego umieszczonego w kadłubie napędzającego prądnicę oraz dwóch silników elektrycznych napędzających śmigła. Ponieważ silnik spalinowy może być wyłączany, a silniki elektryczne przez pewien czas korzystają z baterii akumulatorowej, uzyskano wysoką długotrwałość lotu sięgającą nawet 12 godzin. System rozpoznawczy umieszczono w sterowanej, stabilizowanej w głowicy (kamera światła dziennego oraz termowizyjna), pozwalając na prowadzenie obserwacji w dzień i w nocy. System łączności pozwala na transmisje danych na odległość do 100 km przy wysokości lotu aparatu ok. 5000 m. Wraz ze spadkiem wysokości zasięg łączności i transmisji danych maleje. Aparat startuje z wyrzutni automatycznie i ląduje we wskazanym miejscu też automatycznie. Może wykonać autonomiczny lot po ustalonej trasie, możliwość zmiany trasy w trakcie lotu. Może też być sterowany ręcznie przez operatora, a ponadto można mu wskazać rejon do prowadzenia obserwacji lub może on podążać za śledzonym głowicą optyczną celem.

FT-5 transmituje dane z rozpoznania w czasie rzeczywistym na pojazd Waran, który jest jednocześnie stanowiskiem operatora startu (w kabinie kierowcy) i ma zamontowaną wyrzutnię do startu FT-5 lub bojowego modułu systemu Gladius.
Ten ostatni, to amunicja krążąca typu BSP-U, także zaprojektowana w firmie Flytronic S.A. Ma on również zasięg do 100 km i został zbudowany w układzie klasycznym, z prostym skrzydłem, pojedynczym kadłubem, usterzeniem w układzie litery „T” oraz z silnikiem elektrycznym umieszczonym z tyłu, który napędza śmigło pchające. W przedniej części aparatu umieszczono kamerę służącą operatorowi do celowania. Oba aparaty korzystają też z uodpornionego na zakłócenia elektroniczne odbiornika GPS, stanowiącego podstawę nawigacji. BSP-U ma rozpiętość skrzydeł 2,5 m i przenosi odpowiednią głowicę bojową. Istnieje też szkolna, nieuzbrojona odmiana aparatu znana jako BSP-UT, na którym to aparacie można ćwiczyć realne ataki.

Pojazdy Waran poza wyrzutnią i systemem łączności na maszcie są wyposażone w terminal systemu kierowania ogniem artylerii Topaz, dzięki czemu można podłączyć system do systemu dowodzenia dywizjonu artylerii polowej.
Jeden moduł bateryjny systemu Gladius składa się z pięciu samochodów-wyrzutni, dwóch naziemnych stacji kierowania z których można sterować lotem FT-5 oraz atakami amunicji krążącej BSP-U, pięciu aparatów rozpoznawczych FT-5 oraz nieokreślonej liczby aparatów BSP-U na trzech wozach amunicyjnych przeznaczonych do ich transportu. Na podstawie kontraktu podpisanego w maju 2022 r. Wojsko Polskie kupuje cztery bateryjne moduły systemu Gladius, po jednym dla każdego z pułków artylerii, poczynając od tych, które są rozmieszczone we wschodniej Polsce. Jako pierwsza gotowość bojową osiągnęła bateria Gladius w 18. Pułku Artylerii im. płk. Witolda Sztarka w Nowej Dębie, należący do 18. Dywizji Zmechanizowanej im. gen. broni Tadeusza Buka. Gotowość bojową jednostka osiągnęła w 2023 r.

Michał Fiszer
Titra Technology to turecki start-up, firma wyskotechnologiczna powstała w Ankarze w 2019 r. i jednym z jej pierwszych projektów jest właśnie bezpilotowy śmigłowiec Alpin.
Założycielem firmy jest przedsiębiorca M. Selman Dönmez i Titra Technology wystartowała w 2020 r., a obecnie zatrudnia 98 pracowników. Jej głównym udziałowcem jest firma Pasifik Teknoloji, także zarządzana przez M. Selmana Dönmeza.
Jedną z jej pierwszych prac było dostosowanie włoskiego lekkiego śmigłowca sportowego Heli-Sport CH-7. Jest to ultralekka maszyna produkowana w postaci zestawów do samodzielnego montażu, zabierająca jednego pilota, a w niektórych wersjach także pasażera. Napęd śmigłowca o maksymalnej masie startowej 450 kg stanowi tłokowy silnik Rotax 914 o mocy 115 KM. W wersji załogowej śmigłowiec ma prędkość maksymalną 190 km/h i przelotową 160 km/h, dysponuje zasięgiem 480 km i długotrwałością lotu 3 godziny, a jego maksymalny pułap to 5000 m. Łącznie zbudowano co najmniej 335 śmigłowców, w tym 120 jednomiejscowych, a pozostałe dwumiejscowe. Są to maszyny, które zostały zarejestrowane, choć zestawów sprzedano więcej.

Biorąc za podstawę ten śmigłowiec firmie Titra Technology udało się zredukować masę własną aparatu z 250 kg do 160 kg, poprzez wyrzucenie wszystkiego co zbędne w wersji bezpilotowej: fotela pilota, organów sterowania, przyrządów pokładowych, oszklenia kabiny, itp. Jednocześnie jednak po zamontowaniu wyposażenia potrzebnego dla wersji bezpilotowej masa własna wzrosła do 340 kg (z paliwem, ale niepełnym – dla ładunku użytecznego 160 kg, przy zredukowaniu masy ładunku użytecznego do 20 kg można zwiększyć ilość zabieranego paliwa). Zamiast kabiny pilota w przedniej części kadłuba zamontowano osłonę, w której umieszczono niezbędną aparaturę sterowania, nawigacji i łączności, a także dodatkowe zbiorniki paliwa, co pozwoliło na zwiększenie zasięgu w wersji bezpilotowej do 840 km, a długotrwałość lotu do 7 godzin. Jednak jeśli wykorzystamy do maksimum zdolność do przenoszenia wyposażenia o masie 120 kg, to wówczas długotrwałość lotu spada do 2 godzin, maksymalne 7 godzin uzyskuje się przy wyposażeniu o masie 20 kg, czyli praktycznie przy użyciu wyłącznie głowicy elektrooptycznej. Warto wspomnieć, że istnieje też odmiana transportowa zdolna do transportu ładunku do 160 kg, który można pozostawić we wskazanym miejscu. Prędkość dzięki zmniejszonym oporom udało się podnieść do 210 km/h. Pułap pozostał na poziomie 5000 m, a wznoszenie wynosi do 5 m/s. Długość aparatu wynosi 7 m, średnica wirnika – 6,28 m, wysokość – 2,35 m, a szerokość – 1,5 m. Maksymalna masa startowa w wersji bezpilotowej to 500 kg.
Śmigłowiec wyposażono w łącze radiowe UKF pracujące na zakresie L/S, ale także w system łączności satelitarnej, który pozwala na działania poza zasięgiem bezpośredniej łączności radiowej: Beyond Line out of Sight (BLOS). System ma układ nawigacji oparty głównie na odbiornik GPS uodporniony na zakłócenia radioelektroniczne oraz układ zliczenia drogi w oparciu o dane aerodynamiczne. Do celów pilotażowych ma też radiowysokościomierz. Autopilot został wyposażony w układ automatycznego startu i lądowania pozwalający na start dosłownie po naciśnięciu jednego przycisku, identycznie jest z lądowaniem we wskazanym miejscu. Ładunek użyteczny, czyli wyposażenie rozpoznawcze może się składać ze stabilizowanej głowicy elektrooptycznej z kamerą telewizyjną i termowizyjną, z systemu lidar czyli laserowego skanera terenu, ale możliwe jest też użycie zminiaturyzowanego radaru obserwacji celów naziemnych wyposażonego w zakres zwiększonej rozdzielczości techniką SAR. Zapewne perspektywicznie przewiduje się też użycie systemu rozpoznania radioelektronicznego. Mówi się też o możliwości użycia lekkiego uzbrojenia. Aparat ma też stację laserową do wskazywania celów (ale nie do ich podświetlania), a ponadto został wyposażony w kodowany system transmisji danych w czasie rzeczywistym na naziemne stanowisko dowodzenia.

System Alpin został zakupiony przez tureckie Wojska Lądowe i został już użyty we wschodniej Turcji oraz na pograniczu irackim w operacjach związanych z walkami z rebeliantami kurdyjskimi. Obecnie trwają prace nad dostosowaniem aparatu do użycia na pokładach okrętów do działań nad morzem. Pomaga w tym firma Airbus, dostarczając między innymi system startu i lądowania z pokładu okrętu w ruchu, Airbus Deck Finder. Docelowo firma ma produkować rocznie 10 egzemplarzy bezpilotowców Alpin. Okazuje się, że niewielki śmigłowiec bezpilotowy może być bardzo użyteczny w działaniach tak lądowych, jak i morskich.

Michał Fiszer
Co ciekawe, jednym z krajów, który rozwija własne konstrukcje bezpilotowych aparatów latających, jest Armenia. Jest to o tyle ciekawe, że ormiańskie systemy były używane bojowo z pewnym powodzeniem, choć nie uratowało to Armenii przed stratą Górnego Karabachu na rzecz Azerbejdżanu wspieranego przez Turcję.
Opracowaniem bezpilotowych aparatów latających w Armenii zajął się najpierw ośrodek badawczy Sił Powietrznych Armenii, Instytut Wojskowo-Lotniczy im. marszałka A. Chanfierjanca z Nor-Aczin jeszcze pod koniec pierwszej dekady XXI wieku (obecnie połączony z Uniwersytetem SP Armenii im. Wazgena Sarkasjana). Później do prac jako poddostawca różnych elementów dołączyła firma Instigate Robotics z Erewania założona w 2013 r., we współpracy z duńską firmą Odense Robotics (która ma udziały w Instigate Robotics), które podjęły opracowanie własnych taktycznych bezpilotowych aparatów latających przeznaczonych do rozpoznania i korygowania ognia artylerii.
Prace nad armeńskim aparatem bezpilotowym zaczęły się w 2006 r. Najłatwiej było opracować sam płatowiec. Jego układ został zapożyczony z wielu konstrukcji na świecie, a zapoczątkowany w aparatach izraelskich: krótki kadłub, proste skrzydło, dwie belki ogonowe wychodzące ze skrzydeł, które podtrzymywały statecznik poziomy oraz podwójne usterzenie pionowe. Wzorem aparatów tej klasy (taktycznych) także armeńska konstrukcja otrzymała stałe podwozie. Nie wpływa ono zasadniczo na spadek osiągów, za to jest proste w konstrukcji, niezawodne i nie zwiększa masy aparatu jak podwozie chowane. Napęd w postaci silnika tłokowego można było umieścić zarówno z przodu kadłuba, jak i z tyłu. W pierwszej wersji Krunk 25-1 (Krunk to po armeńsku żuraw) dwucylindrowy silnik tłokowy napędzający dwułopatowe śmigło drewniane umieszczono z przodu, zaś w późniejszej wersji Krunk 25-2 silnik tłokowy umieszczono z tyłu, napędza on trójłopatowe śmigło pchające, także drewniane o stałym skoku, a sam kształt kadłuba zmieniono, dodając wydłużony smukły nos.
Aparaty Krunk 25-1 o masie startowej 50 kg, o rozpiętości 3,64 m, długości 2,75 m i wysokości 70 cm startują zwykle z katapulty, a lądują na własnym podwoziu lub na spadochronie. Wyposażenie nawigacyjne i łączności jest w znacznym stopniu importowane za pośrednictwem duńskiej firmy i składa się z odbiornika GPS, centrali danych aerodynamicznych, komputera zliczającego drogę oraz szyfrowanego systemu łączności, aparat wyposażono też w autopilota. Wyposażenie rozpoznawcze składa się ze stabilizowanej kamery wideo oraz łącza danych do transmisji obrazu na naziemną stację kierowania. Ta ostatnia została urządzona na trójosiowej rosyjskiej ciężarówce terenowej Kamaz. Armeńska firma dostarczyła też wynośne tablety dla oficerów rozpoznania oddziałów taktycznych, pozwalające na odbiór i obserwację obrazu z kamery. Zasięg systemu łączności wynosi 70 km, ale aparat może wykonać też lot autonomicznie (bez łączności) po zadanej trasie i wykonać zdjęcia kamerą ustawioną pionowo lub pod wybranym z góry kątem, transmitując obraz z pamięci stałej po wejściu w zasięg łączności. Taktyczny promień takiego lotu sięga 150 km. Długotrwałość lotu wynosi 3 godziny, z półgodzinną rezerwą paliwa.
Odmiana Krunk 25-2 różni się konstrukcją kadłuba i umieszczeniem silnika z innym śmigłem z tyłu. Podobnie jak poprzednia wersja aparat ma prędkość maksymalną 140 km/h, przelotową ok. 110 km/h i podejścia do lądowania 80 km/h. Wysokość prowadzenia rozpoznania wynosi od 500 do 3500 m, zaś pułap maksymalny nieco przekracza 4000 m.
Od 2011 r. wojska Armenii mają 15 aparatów Krunk i 5 stacji kierowania lotem, przy czym w miarę strat Krunk 25-1 były zastępowane przez Krunk 25-2. Docelowo zaś do uzbrojenia ma wejść podobnej klasy aparat X-55. W 2015 r. pokazano go po raz pierwszy i ma on bardzo podobny układ, z tym że belki ogonowe są bliżej siebie, a silnik ponownie przeniesiono na przód kadłuba. Przy podobnych parametrach wielkościowych wzrosła długotrwałość lotu do 4 godzin, a zasięg łączności do 100 km. Poza zastosowaniem wojskowym, przewiduje się użycie X-55 także w straży granicznej i do innych zastosowań cywilnych.
Poza wymienionymi opracowano też jeszcze mały taktyczny aparat do obserwacji pola walki i korygowania ognia artylerii znany jako Baze. Ma on silnik elektryczny ze śmigłem pchającym umieszczonym w gondoli nad kadłubem. Poza tym układ aparatu jest klasyczny za wyjątkiem motylkowego usterzenia. Aparat o masie startowej 7 kg, rozpiętości skrzydeł 2,8 m, długości kadłuba 1,6 m startuje z ręki, a ląduje automatycznie metodą głębokiego przeciągnięcia. W związku z tym nie ma podwozia. Stacja sterowania znajduje się na samochodzie osobowo-terenowym UAZ, zasięg łączności do 30 km, zaś długotrwałość lotu wynosi ok. godziny. Pułap operacyjny to 2000 m. Aparat Baze też jest od niedawna stosowany przez Siły Zbrojne Armenii.
Wszystkie wymienione aparaty brały udział w realnych działaniach bojowych przeciwko Azerbejdżanowi i w ocenie ormiańskiego dowództwa – sprawdziły się.
Na wszystkich zdjęciach ormiańskie bezpilotowe aparaty latające na defiladzie w Erewaniu w 2016 r.:






Michał Fiszer, współpraca Maciej Herman
Fakt, że takie państwo jak Nigeria wprowadziło do służby własny bezpilotowy aparat latający świadczy o tym, że nie są to systemy skomplikowane i mogą być opracowane relatywnie łatwo. Nigeria nie ma bowiem rozwiniętego przemysłu lotniczego, zbrojeniowego czy elektronicznego, nie ma też doświadczenia technicznego na tym polu.
Bezpilotowe aparaty latające to relatywnie prosta technologia. Komplikacje zaczynają się w kilku obszarach: niezawodności, odporności na zakłócenia, przeżywalności na polu walki oraz jakości zbieranego materiału rozpoznawczego. To są już dziedziny, w których wymagana jest już pewna wiedza techniczna i technologiczna z dziedziny budowy systemów sterowania wraz z autopilotem, odpowiednio niezawodnych i cichych silników, precyzyjnej aparatury nawigacyjnej, dobrego odpornego na zakłócenia systemu łączności oraz efektywnego systemu misji (głównie rozpoznawczego, choć w przypadku zastosowania bojowego – także celowniczego, no i samego uzbrojenia).

W drugiej dekadzie XXI wieku własne prace nad taktycznym bezpilotowym aparatem latającym podjęła Nigeria. W Nigerii były już pewne doświadczenia z użycia izraelskich aparatów typu Aerostar Orbiter, które zakupiono w 2006 r., by patrolować newralgiczny teren delty rzeki Niger, gdzie znajdują się cenne pola naftowe Nigerii. Trudności, jakich doświadczono z ich eksploatacją sprawiły, że już w 2009 r. wszystkie pozostałe (trzy z pięciu) aparaty uziemiono. Jednocześnie Nigeria podjęła próbę opracowania własnego bezpilotowego aparatu latającego, co wydawało się być zadaniem relatywnie prostym.
Tak powstał niewielki (masa do 100 kg) aparat wzorowany nieco na wczesnych konstrukcjach izraelskich: krótki kadłub z silnikiem umieszczonym z tyłu i ze śmigłem pchającym, proste skrzydła o relatywnie dużej rozpiętości, belki ogonowe ze skrzydeł, które z tyłu połączono statecznikiem poziomym, na których znajdują się podwójne stateczniki pionowe. Do napędu wybrano dostępny komercyjnie silnik tłokowy, choć nie ujawniono typu.

Aparat nazwany Gulma został opracowany całkowicie siłami przemysłu nigeryjskiego w 2013 r., ale jak się można tego było spodziewać, nic z tego nie wyszło. Pojawiły się problemy, których w Nigerii nie potrafiono samodzielnie rozwiązać. Dlatego postanowiono wejść w kooperację z jakąś firmą dysponującą odpowiednią wiedzą, know-how i doświadczeniem. Dlatego w 2016 r. nawiązano współpracę z portugalską firmą UAVision Aeronautics z Lizbony. Nie jest to wielki producent bezpilotowych aparatów latających, ale ma na koncie kilka własnych konstrukcji pozostających w służbie w kilku państwach. Wraz z tą firmą opracowano nowy aparat oparty w znacznym stopniu na Gulma, ale z importowanym układem sterowania, a także ze wspólnie opracowanym systemem łączności oraz z importowaną głowicą optyczną. Nowy aparat opracowała nigeryjska firma NAF Optimising Local Engineering i testy aparatu prowadzono w bazie Sił Powietrznych Munda. W opracowaniu aparatu uczestniczyło też centrum badawcze Sił Powietrznych, Nigerian Air Force Research & Development Centre.
Oficjalne przyjęcie do uzbrojenia nowego aparatu Tsaigumi nastąpiło 15 lutego 2018 r. Nowy aparat ma masę startową 95 kg, długość 8,6 m, rozpiętość skrzydeł 6,8 m i jest napędzany silnikiem tłokowym o mocy 172 KM. Dzięki niemu rozwija prędkość 250 km/h i ma możliwość wykonywania lotów na odległość do 100 km (wydaje się, że jednak nieco mniej) na wysokości 1500 m w czasie do 10 godzin. Importowana głowica elektrooptyczna oraz łącze transmisji danych zapewnia przekazywanie danych z rozpoznania w czasie rzeczywistym na naziemne stanowisko kierowania, obsługiwane przez trzech operatorów: dowódca misji, pilot i nawigator. Aparat jest wyposażony w odbiornik GPS zapewniający precyzyjną nawigację. Startuje i ląduje na własnym stały podwoziu.

Okazuje się, że nawet Nigeria jest w stanie, z pewna pomocą, opracować własny taktyczny bezpilotowy aparat rozpoznawczy. Jak więc widać, nie są to skomplikowane technologie.
Mało kto pamięta, ale pierwsze bojowe bezpilotowe aparaty latające narodziły się w Stanach Zjednoczonych już w latach 1940-1942. Warto o tym pamiętać ponad 80 lat później, kiedy to podobne aparaty są używane na dość dużą skalę. Ale dopiero od niedawna.

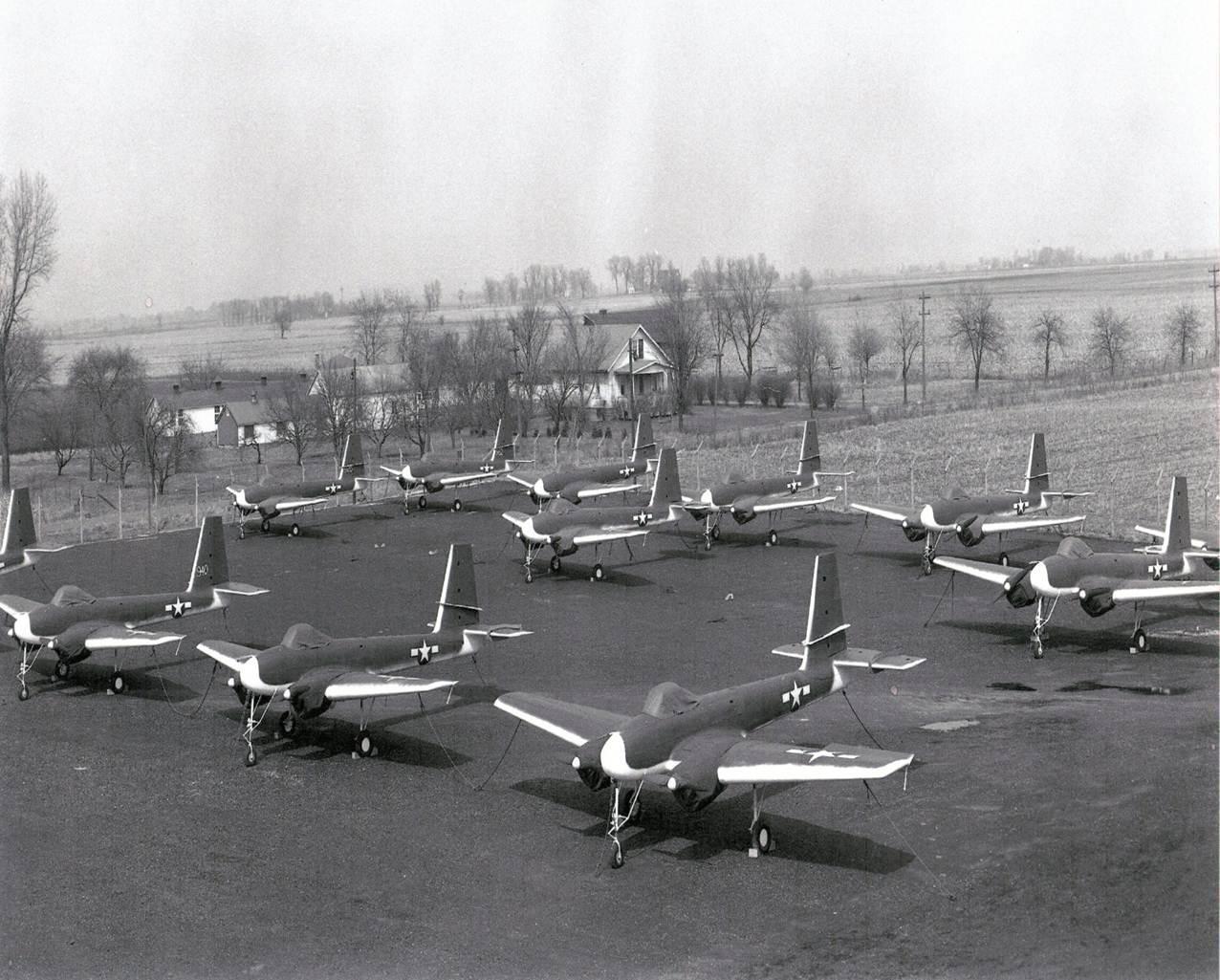
W 1936 r. kmdr ppor. Delmer S. Fahrney, inżynier Marynarki Wojennej który został przydzielony do państwowej wytwórni Naval Aircraft Factory w Filadelfii zaproponował opracowanie i zbudowanie zdalnie sterowanego radiowo bezpilotowego aparatu, który miałby atakować wrogie okręty. W tym czasie jednak problemy techniczne były praktycznie nie do pokonania, więc prace posuwały się powoli. Jednak w 1940 r. poziom wiedzy ówczesnej jeszcze raczkującej telewizji oraz opracowanie działającego w miarę poprawnie radiowysokościomierza pozwolił na podjęcie budowy prototypów takich aparatów. Początkowo opracowaną aparaturę wypróbowano na pilotowanym samolocie, a później przystąpiono do budowy aparatu bez pilota. Pierwsze jego próby kolejnych elementów systemu przeprowadzono w kwietniu 1942 r. na przebudowanym seryjnym samolocie, który mógł być pilotowany, ale mógł latać bez załogi. Pierwsze prototypy wykonano w Naval Aircraft Factory pod oznaczeniem TDN-1, nazywając je „assault drone” – czyli „szturmowy bezpilotowiec”. Był to tak naprawdę protoplasta dzisiejszej amunicji krążącej.
Pierwszy prototyp XTDN-1 oblatano w Filadelfii 15 listopada 1942 r. Był to prosty samolocik ze stałym podwoziem o konstrukcji drewnianej, napędzany dwoma silnikami Franklin O-300 o mocy po 220 KM. Prędkość aparatu wynosiła 235 km/h. Rozpiętość skrzydeł 15 m, długość – 11 m. Uzbrojenie miało się składać z jednej bomby 908 kg lub torpedy lotniczej, która mogła być zrzucana lub pozostać pod samolotem przy „sambójczym” ataku. Sterowanie miało się odbywać zdalnie (prototypy miały kabinę do opcjonalnego pilotowania aparatu), zaś system miał być wyposażony w kamerę telewizyjną (wówczas była to nowość) lub w radar, zaś obraz z kamery lub radaru miał być transmitowany do operatora, który wykorzystywał go do celowania. Łącznie, poza kilkunastoma prototypami XTDN-1, zbudowano 100 seryjnych TDN-1, ale żaden nie został użyty zgodnie z przeznaczeniem, wykorzystywano je jako zdalnie sterowane cele latające.
Interstate TDR-1
Zamknięcie programu TDN-1, nie oznaczało końca prac na tego typu aparatami bezpilotowymi. We wrześniu 1942 r. zakontraktowano mało znaną firmę lotniczą Interstate Aircraft and Engineering Corporation z Kalifornii, która produkowała komponenty na rzecz innych firm płatowcowych. Próby podobnego do TDN-1 aparatu prowadzono w porcie lotniczym DeKalb w Illinois, gdzie był mniejszy ruch lotniczy niż w Kalifornii. Aparaty oznaczone TDR-1 miały podobną konstrukcję do TDN-1. Główną różnicą było podwozie odrzucane po starcie, jeżeli start miał nastąpić do misji bojowej. Napęd aparatu stanowiły dwa silniki Lycoming O-435-2 o mocy po 220 KM, prędkość maksymalna wynosiła 230 km/h, a masa 2650 kg przy tej samej rozpiętości skrzydeł 15 m. Aparat miał kamerę telewizyjną, a obraz z niej mógł być transmitowany na odległość do 15 km, dlatego operator siedział na odpowiednio przebudowanym pokładowym samolocie torpedowym TBF/TBM Avenger. Sterował on aparatem za pomocą aparatury radiowej, obserwując obraz z kamery i wskazania radiowysokościomierza.
Zamówiono łącznie 1000 aparatów TDR-1 i zaplanowano przebudowę 162 samolotów TBF jako powietrzne stanowiska kierowania. Latem 1943 r. sformowano w Marynarce Wojennej grupę bojową Special Task Air Group One (STAG-1), w której były dwa dywizjony samolotów kierowania TBF Avenger, VK-11 i VK-12, a także grupa bezpilotowców TDR-1 wraz z obsługą. Po szkoleniu i przerzucie na Pacyfik, 30 lipca 1944 r. przeprowadzono próbny atak: celem był japoński statek Yamazuki Maru który wszedł na mieliznę u wybrzeży Guadalcanal i Amerykanie chcieli go zniszczyć, zanim Japończycy go odzyskają. Atak na stacjonarny cel był udany i statek został zniszczony pięcioma aparatami TDR-1.

27 września 1944 r. przeprowadzono podobną akcję na unieruchomiony na mieliźnie japoński statek Hitati Maru, który utknął przy wyspie Bougainville, także i ten cel został zniszczony. 1 października 1944 r. osiem dronów TDR-1 użyto do ataku na baterie artylerii przeciwlotniczej na wyspach Ballale i Poporang, zniszczono trzy pozycje ciężkich dział przeciwlotniczych. 17 października 1944 r. aparaty TDR-1 zniszczyły skład amunicji pod Rabaul. 20 października 1944 r. TDR-1 zniszczyły statek Kahili Maru w pobliżu Ballale, który służył tu jako bateria artylerii przeciwlotniczej.

Łącznie w walkach użyto 50 aparatów, z czego w cele trafiła połowa. Mimo relatywnie udanego ich użycia, program został zamknięty, ponieważ w owym okresie czyli jesienią 1944 r. amerykańskie lotnictwo pilotowane było już bardzo skuteczne, a użycie bezpilotowców było dość kłopotliwe i borykały się one z problemami technicznymi. To przerwało prace nad podobnymi systemami na długi czas. Nie ulega jednak wątpliwości, że był to pierwowzór współczesnej amunicji krążącej (dronów-kamikaze) i że jego użycie bojowe było faktem.


Michał Fiszer
Pierwszym amerykańskim pokładowym bezpilotowym aparatem latającym był IAI/AAI Corporation RQ-2 Pioneer wprowadzony do służby już w 1985 r., ale był to aparat wyłącznie rozpoznawczy. Natomiast nowy MQ-25 to już całkowicie nowa generacja i będzie on stosowany jako aparat wielozadaniowy, w tym też bojowy. Na początku jednak ma być głównie wykorzystywany w roli pokładowego tankowca towarzyszącego.
Pierwotnie zakładano, że zostanie zbudowana platforma pokładowa, czysto bojowa. Dlatego po studiach prowadzonych od 2006 r., 19 marca 2010 r. oficjalnie rozpoczęto program Unmanned Carrier-Launched Airborne Surveillance and Strike (UCLASS) System. W ramach tego programu powstał m.in. demonstrator technologii bojowego aparatu o utrudnionej wykrywalności Northrop Grumman X-47B, który został oblatany 4 lutego 2011 r. Z kolei firma General Atomics zaoferowała morską odmianę swojego aparatu MQ-20 Avenger.
Ostatecznie jednak program nie był kontynuowany w pierwotnym kierunku. Określono bowiem, że należy jeszcze pokonać wiele różnych barier technologicznych, co oczywiście jest możliwe ale wymaga dość sporych nakładów finansowych. Lata 2010-2012 były jeszcze relatywnie spokojne, nawet przed aneksją Krymu przez Rosję, więc program w zasadzie zamknięto.
W tym czasie jednak US Navy rozważała zastosowanie nowego bezpilotowca w roli towarzyszącego tankowca dla swoich bojowych samolotów pokładowych. Przez długie lata w tej roli stosowano samolot Grumman KA-6D Intruder, później zastąpiony przez F/A-18F Super Hornet. O ile pierwszy typ był dedykowanym samolotem do tankowania powietrznego (choć występował w dywizjonach szturmowych razem z bojowymi A-6E Intruder), to Super Hornety jedynie dostosowuje się do roli tankowca powietrznego przez podwieszenie czterech dodatkowych zbiorników paliwa pod skrzydłami oraz systemu do tankowania Automated Aerial Refueling (AAR) pod kadłubem. Potrzeba posiadania odpowiedniego tankowca powietrznego stała się jednak coraz bardziej wyraźna, bowiem używanie samolotu bojowego do tej roli to marnowanie jego możliwości bojowych.
Dlatego 1 lutego 2016 r. rozpoczęto nowy program Carrier-Based Aerial-Refueling System (CBARS), czyli pokładowy system tankowania powietrznego, który czasem nazywano „mały UCLASS”, jako że bazował on na wielu rozwiązaniach UCLASS, w tym na przykład w zakresie sterowania, nawigacji i lądowania na pokładzie lotniskowca. Ostatecznie do dalszej realizacji wybrano propozycję firmy Boeing, która jeszcze w końcu 2016 r. otrzymała oznaczenie MQ-25A. Sugeruje to wielozadaniowość budowanego aparatu, choć początkowo nadano mu oznaczenie RAQ-25A.

Pierwszy egzemplarz MQ-25 został ukończony w Saint Louis w Missouri w kwietniu 2019 r. i po serii intensywnych prób naziemnych wykonał on pierwszy lot 19 września 2019 r. w bazie Scott, w części Saint Louis leżącej po drugiej stronie rzeki Missisipi, czyli w stanie Illinois.
Aparat ma układ klasyczny z usterzeniem motylkowym (w kształcie litery „V”). Ma on płaski kadłub odpowiadający potrzebom utrudnionego wykrycia radarowego, w tyle którego zamontowano silnik Rolls-Royce AE 3007N o ciągu 44 kN. Chwyt powietrza do silnika znajduje się na górze kadłuba. Aparat ma skrzydła proste o rozpiętości 22,9 m, które na potrzeby hangarowania na lotniskowcu są składane, co zmniejsza szerokość aparatu do 9,54 m. Długość kadłuba wynosi 15,5 m. Ma on możliwość przetoczenia do 7250 kg na odległości do 930 km od lotniskowca, co zwiększa taktyczny promień działania samolotu F/A-18 Super Hornet z 930 km do 1300 km. Prędkości maksymalnej i przelotowej aparatu oraz jego pułapu nie podano do publicznej wiadomości.

W latach 2020-2021 prowadzono próby aparatu na pokładzie lotniskowca USS George H.W. Bush (CVN-77) z użyciem podwieszanego systemu do tankowania w powietrzu Cobham Aerial Refueling Store (ARS). 4 czerwca 2021 r. przeprowadzono pierwsze tankowanie w powietrzu samolotu F/A-18F Super Hornet. Po próbach w 2022 r. zamówiono dla US Navy 76 aparatów tego typu, pierwsze cztery wchodzą obecnie do uzbrojenia nowo sformowanego dywizjonu Unmanned Carrier Launched Multi-Role Squadron 10 (VUQ-10) w bazie Point Mugu w Kalifornii. Jednostka ma osiągnąć gotowość bojową w 2025 r., a w 2026 r. ma wyruszyć w pierwszy rejs operacyjny na pokładzie lotniskowca USS Theodore Roosevelt (CVN-71). Pierwsza jednostka ma mieć charakter szkolny, operacyjne będą kolejne dwa dywizjony, VUQ-11 i VUQ-12, które dopiero mają powstać.

Jednocześnie obecnie trwają próby aparatu MQ-25A wyposażonego w głowicę elektrooptyczną, co sugeruje możliwość wykorzystania aparatu do prowadzenia rozpoznania akwenów morskich lub nawet nad lądem, z uzbrojeniem w postaci dwóch pocisków przeciwokrętowych AGM-158C LRASM (Long Range Anti-Ship Missile) o zasięgu do 370 km, powstałych jako jedna z odmian pocisku JASSM. Nie jest więc wykluczone, że w przyszłości rola aparatów MQ-25A będzie poszerzona o rozpoznanie obszarów morskich oraz atakowanie obiektów nawodnych.

NORFOLK, Va. (Nov. 10, 2021) The U.S. Navy and Boeing conducted ground testing of the MQ-25 Stingray at Chambers Field onboard Naval Station Norfolk, Virginia. The MQ-25 Stingray is an unmanned aerial refueling aircraft. (U.S. Navy photo by Mass Communication Specialist 2nd Class Sam Jenkins)


Michał Fiszer
Już teraz zapisz się
do naszego newslettera
Bądź na bieżąco z nowościami